
CUDA开始的GPU编程-第一章
第一章:线程与板块
三重尖括号里的数字
刚刚说了 CUDA 的核函数调用时需要用 kernel<<<1, 1>>>() 这种奇怪的语法,这里面的数字代表什么意思呢?
不妨把 <<<1, 1>>> 改成 <<<1, 3>>> 试试看。你会看到 Hello, world! 打印了三遍!
1 |
|
原来,三重尖括号里的第二个参数决定着启动 kernel 时所用 GPU 的线程数量。
GPU 是为并行而生的,可以开启很大数量的线程,用于处理大吞吐量的数据。
获取线程编号
1 |
|
可以通过 threadIdx.x 获取当前线程的编号,我们打印一下试试看。
这是 CUDA 中的特殊变量之一,只有在核函数里才可以访问。
可以看到线程编号从0开始计数,打印出了0,1,2。这也是我们指定了线程数量为 3 的缘故。
- 等等,为什么后面有个 .x?稍后再说明。
获取线程数量
还可以用 blockDim.x 获取当前线程数量,也就是我们在尖括号里指定的 3。
1 |
|
线程之上:板块
接下来我们修改"<<< >>>"中的另一个参数
1 |
|
我们发现启动了六个线程,而且被分为两组。
CUDA 中还有一个比线程更大的概念,那就是板块(block),一个板块可以有多个线程组成。这就是为什么刚刚获取线程数量的变量用的是 blockDim,实际上 blockDim 的含义是每个板块有多少个线程。
要指定板块的数量,只需调节三重尖括号里第一个参数即可。我们这里调成 2。总之:
1 | <<<板块数量,每个板块中的线程数量>>> |
可以看到这里我们启动了两个板块,各有3个线程,都打印了一样的数据。
获取板块编号和数量
板块的编号可以用 blockIdx.x 获取。
板块的总数可以用 gridDim.x 获取。
1 |
|
可以看到这里执行了两个板块,每个板块又有三个线程,总共有2*3=6个线程。
而且看到这里板块1在板块0之前执行了(你的可能不是),这是因为板块之间是高度并行的,不保证执行的先后顺序。线程之间也是,这里线程打印顺序没乱,不过是碰巧小于32而已。
- 关于这个32我们后边会讨论
理解线程管理
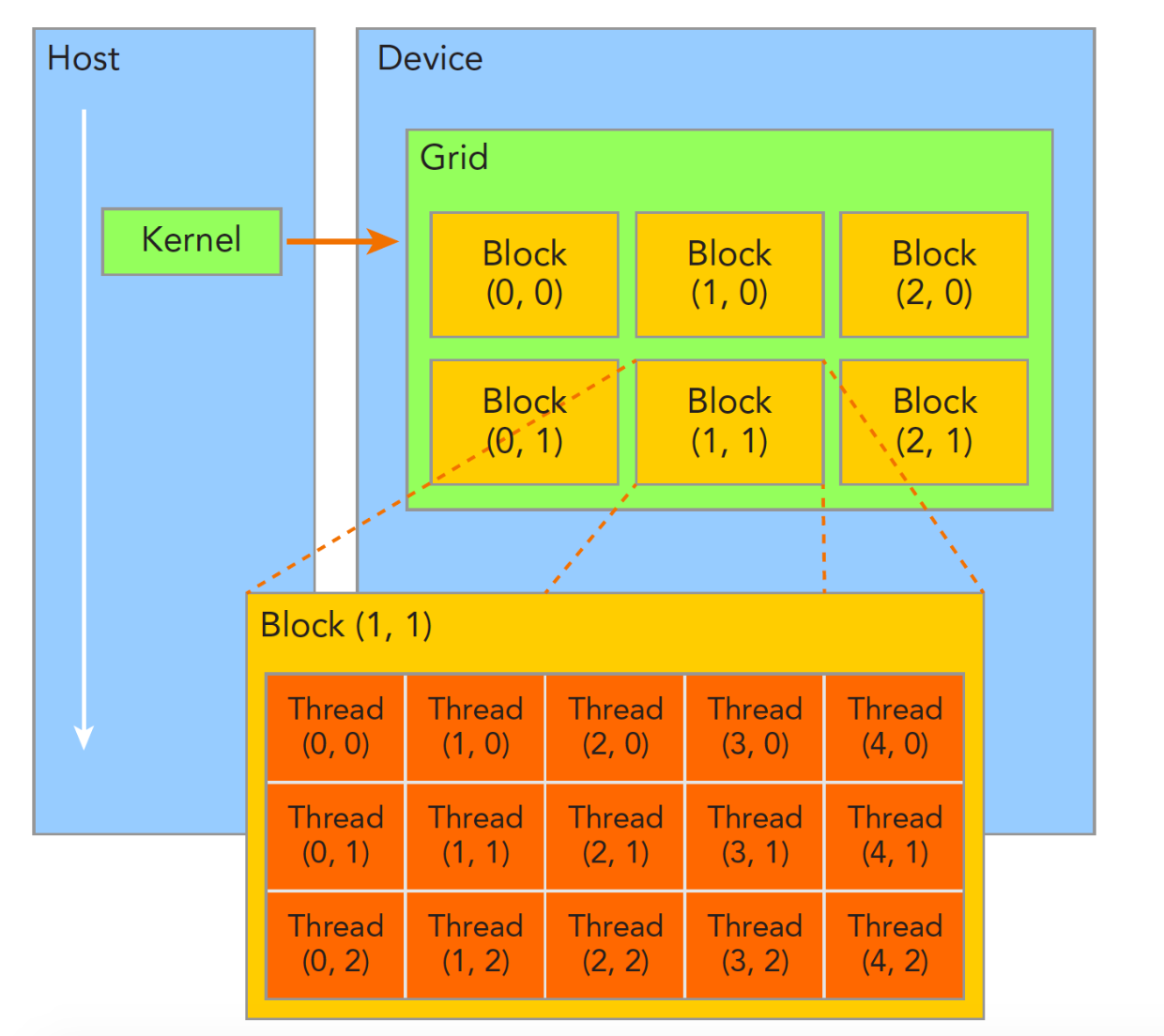
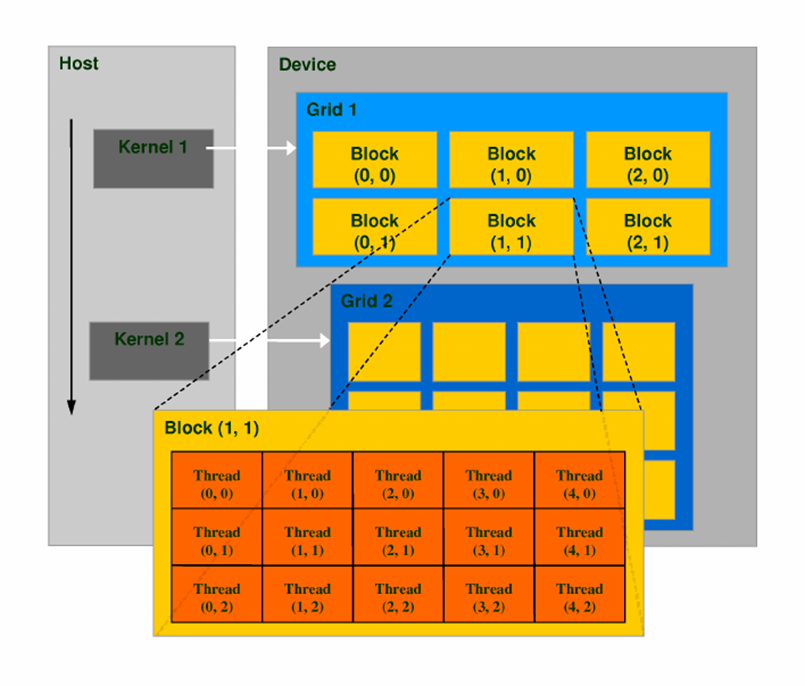
接下来我们整体理解一下CUDA中的线程管理,CUDA将计算任务划分为多个层次,包括线程、板块(block)和网格(grid)。
线程、板块与网格的层次结构
- 线程 (Thread):是CUDA中的基本执行单元。每个线程可以独立地执行相同的代码,但处理不同的数据。
- 板块 (Block):是由多个线程组成的集合。一个板块内部的线程可以共享内存并进行协作,使得数据传输和计算更加高效。
- 网格 (Grid):是包含若干个板块的集合,代表整个计算任务。一个网格可以是多维的(如一维、二维或三维),以适应不同类型的数据结构。
从属关系
在CUDA的层次结构中,线程、板块和网格之间存在如下从属关系:
- 线程 < 板块 < 网格
这种关系说明,一个网格由多个板块组成,而每个板块又由多个线程组成。
重要变量
在CUDA中,有几个重要的变量用于访问当前线程和板块的信息:
| 变量名称 | 描述 |
|---|---|
threadIdx |
当前线程在其所属板块中的编号。 |
blockDim |
当前板块中线程的数量。 |
blockIdx |
当前板块在网格中的编号。 |
gridDim |
网格中总的板块数量。 |
调用语法
在CUDA中,调用内核函数的语法为:
1 | kernel_function<<<gridDim, blockDim>>>(parameters); |
这里,gridDim指定了网格的维度和大小,而blockDim则定义了每个板块的线程数量。通过合理设置这两个参数,可以充分利用GPU的并行计算能力。
我们在CPU编程中的经验告诉我们,只要有了线程,就可以实现并行,为什么还要引入板块、网格这些概念?稍后我们就会进行说明。
“扁平化”理解
通过上面的这些变量,我们可以获取总线程数、总板块数以及当前线程的全局编号等等,方便管理和访问数据。下面是几个常用的公式:
总板块数:
gridDim 就表示着板块的数量,一维情况下就是 gridDim.x
1 | int totalBlocks = gridDim.x; // 只考虑x维度 |
总线程数:
网格中块的数量乘以每个块中的线程数量。
1 | int totalThreads = gridDim.x * blockDim.x; // 只考虑x维度 |
gridDim.x是网格在x维度上块的数量,而blockDim.x是每个块中线程的数量
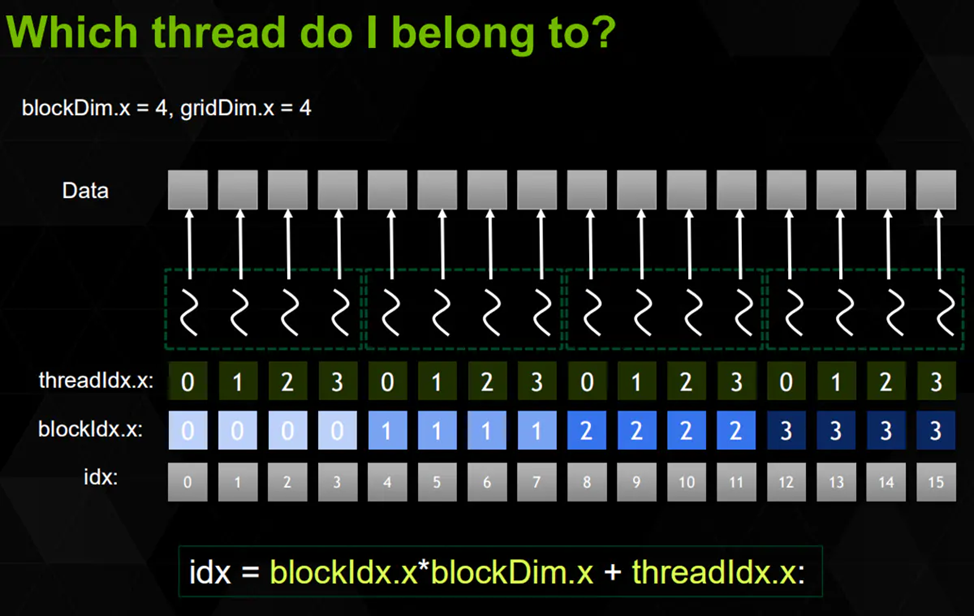
当前线程的全局编号:
全局编号可以唯一标识每个线程在整个网格中的位置,就可以控制每个线程操作不同的数据。
因为索引下标是从0开始,所以我们可以这样计算:
1 | int globalThreadId = blockIdx.x * blockDim.x + threadIdx.x; // 只考虑x维度 |
blockIdx.x:当前块在网格中的索引(0,1,2……)
blockDim.x:块中线程的数量(注意这里不从0开始)
threadIdx.x:当前线程在其所属块中的索引(0,1,2……)
下面是示例:
1 |
|
- 剧透一下:实际上 GPU 的板块相当于 CPU 的线程,GPU 的线程相当于 CPU 的SIMD,可以这样理解,但不完全等同。
- SIMD(Single Instruction, Multiple Data)是一种计算机架构设计理念,允许在单个指令下对多个数据元素进行并行处理。更多内容请自行了解
图形理解
线程组织结构图:
线程计算:
三维的板块和线程编号
CUDA 也支持三维的板块和线程区间。
只要在三重尖括号内指定的参数改成 dim3 类型即可。dim3 的构造函数就是接受三个无符号整数(unsigned int)非常简单。
dim3(x, y, z)
1 |
|
这样在核函数里就可以通过 threadIdx.y 获取 y 方向的线程编号,以此类推。
二维:
只需要把 dim3 最后一位(z方向)的值设为 1 即可。这样就只有 xy 方向有大小,就相当于二维了,不会有性能损失。
- 实际上一维的
<<<m, n>>>不过是<<<dim3(m, 1, 1), dim3(n, 1, 1)>>>的简写而已。
为什么要分三维这种结构?
之所以会把 blockDim 和 gridDim 分三维主要是因为 GPU 的业务常常涉及到三维图形学和二维图像,觉得这样很方便,并不一定 GPU 硬件上是三维这样排列的。
三维情况下同样可以获取总的线程编号(扁平化),只需要分别对三个维度进行操作
如需总的线程数量:blockDim * gridDim
如需总的线程编号:blockDim * blockIdx + threadIdx
补充:分离 device 函数的声明和定义
出错:
我们在hello.cu中定义一个设备上的函数
1 | // hello.cu |
在main.cu文件中声明并调用:
1 | // main.cu |
进行编译就会报错:
1 | ptxas fatal : Unresolved extern function '_Z9say_hellov' |
默认情况下 GPU 函数必须定义在同一个文件里。如果你试图分离声明和定义,调用另一个文件里的 __device__ 或 __global__ 函数,就会出错。
解决:
开启 CMAKE_CUDA_SEPARABLE_COMPILATION 选项(设为 ON),即可启用分离声明和定义的支持。
1 | cmake_minimum_required(VERSION 3.10) |
但是,我们仍然建议把要相互调用的 __device__ 函数放在同一个文件,这样方便编译器自动内联优化(第四课讲过)
两种开启方式:全局有效or仅针对单个程序
- 对下方所有的程序启用(推荐):
1 | set(CMAKE_CUDA_SEPARABLE_COMPILATION ON) # 分离编译 |
- 只对 main 这个程序启用:
1 | add_executable(main main.cu hello.cu) |
- 顺便一提,CXX_STANDARD 和 CUDA_ARCHITECTURES 也有这两种方式,一般推荐直接设置全局的 CMAKE_CXX_STANDARD 即可应用到全部 add_executable/add_library 的对象上,比较方便。
进一步:核函数调用核函数
从 Kelper 架构开始,__global__ 里可以调用另一个 __global__,也就是说核函数可以调用另一个核函数,且其三重尖括号里的板块数和线程数可以动态指定,无需先传回到 CPU 再进行调用,这是 CUDA 特有的能力。
1 |
|
常用于这种情况:需要从 GPU 端动态计算出 blockDim 和 gridDim,而又不希望导回数据到 CPU 导致强制同步影响性能。
- 这种模式被称为动态并行(dynamic parallelism),OpenGL 有一个 glDispatchComputeIndirect 的 API 和这个很像,但毕竟没有 CUDA 可以直接在核函数里调用核函数并指定参数这么方便……
不过,这个功能同样需要开启 CUDA_SEPARABLE_COMPILATION。






