第四章:C++封装GPU上的数组 std::vector的秘密:第二模板参数 **你知道吗?**std::vector 作为模板类,其实有两个模板参数:
1 std::vector<T, AllocatorT>
那为什么我们平时只用了 std::vector 呢?因为第二个参数默认是 std::allocator。
也就是 std::vector 等价于 std::vector<T, std::allocator>。
std::allocator 的功能是负责分配和释放内存,初始化 T 对象等等。
它具有如下几个成员函数:
1 2 3 T *allocate (size_t n) void deallocate (T *p, size_t n)
抽象的 std::allocator 接口 vector 会调用 std::allocator 的 allocate/deallocate 成员函数,他又会去调用标准库的 malloc/free 分配和释放内存空间(即他分配是的 CPU 内存)。
我们可以自己定义一个和 std::allocator 一样具有 allocate/deallocate 成员函数的类,这样就可以“骗过”vector,让他不是在 CPU 内存中分配,而是在 CUDA 的统一内存(managed)上分配。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 #include <cuda_runtime.h> #include <cstdio> #include <vector> #include "helper_cuda.h" template <class T >struct CudaAllocator { using value_type = T; T *allocate (size_t size) { T *ptr = nullptr ; checkCudaErrors (cudaMallocManaged (&ptr, size * sizeof (T))); return ptr; } void deallocate (T *ptr, size_t size = 0 ) checkCudaErrors (cudaFree (ptr)); } }; __global__ void kernel (int *arr, int n) { for (int i = blockDim.x * blockIdx.x + threadIdx.x; i < n; i += blockDim.x * gridDim.x) { arr[i] = i; } } int main () int n = 65536 ; std::vector<int , CudaAllocator<int >> arr (n); kernel<<<32 , 128 >>>(arr.data (), n); checkCudaErrors (cudaDeviceSynchronize ()); for (int i = 0 ; i < n; i++) { printf ("arr[%d]: %d\n" , i, arr[i]); } return 0 ; }
实际上这种“骗”来魔改类内部行为的操作,正是现代 C++ 的 concept 思想所在。因此替换 allocator 实际上是标准库允许的,因为他提升了标准库的泛用性。
进一步:避免初始化为0 vector 在初始化的时候(或是之后 resize 的时候)会调用所有元素的无参构造函数,对 int 类型来说就是零初始化。然而这个初始化会是在 CPU 上做的,因此我们需要禁用他。
可以通过给 allocator 添加 construct 成员函数,来魔改 vector 对元素的构造。默认情况下他可以有任意多个参数,而如果没有参数则说明是无参构造函数。
因此我们只需要判断是不是有参数,然后是不是传统的 C 语言类型(plain-old-data),如果是,则跳过其无参构造,从而避免在 CPU 上低效的零初始化。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 #include <cuda_runtime.h> #include <cstdio> #include <vector> #include "helper_cuda.h" template <class T >struct CudaAllocator { using value_type = T; T *allocate (size_t size) { T *ptr = nullptr ; checkCudaErrors (cudaMallocManaged (&ptr, size * sizeof (T))); return ptr; } void deallocate (T *ptr, size_t size = 0 ) checkCudaErrors (cudaFree (ptr)); } template <class ... Args> void construct (T *p, Args &&...args) if constexpr (!(sizeof ...(Args) == 0 && std::is_pod_v<T>)) ::new ((void *)p) T (std::forward<Args>(args)...) ; } }; __global__ void kernel (int *arr, int n) { for (int i = blockDim.x * blockIdx.x + threadIdx.x; i < n; i += blockDim.x * gridDim.x) { arr[i] = i; } } int main () int n = 65536 ; std::vector<int , CudaAllocator<int >> arr (n); kernel<<<32 , 128 >>>(arr.data (), n); checkCudaErrors (cudaDeviceSynchronize ()); for (int i = 0 ; i < n; i++) { printf ("arr[%d]: %d\n" , i, arr[i]); } return 0 ; }
解释一下construct函数的写法:
if constexpr (条件)是 C++17的语法,根据条件在编译期选择性编译不同的代码sizeof...(Args) == 0 && std::is_pod_v<T>:判断参数包 Args 是否为空(没有构造参数)并且类型 T 是否是 POD 类型。::new 是一种使用显式地址来调用构造函数的语法,可以指定对象应该在内存的哪个位置进行构造。
进一步:核函数可以是一个模板函数 刚刚说过 CUDA 的优势在于对 C++ 的完全支持。所以 __global__ 修饰的核函数自然也是可以为模板函数的。
调用模板时一样可以用自动参数类型推导,如有手动指定的模板参数(单尖括号)请放在三重尖括号的前面。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 #include <cuda_runtime.h> #include <cstdio> #include <vector> #include "helper_cuda.h" template <class T >struct CudaAllocator { using value_type = T; T *allocate (size_t size) { T *ptr = nullptr ; checkCudaErrors (cudaMallocManaged (&ptr, size * sizeof (T))); return ptr; } void deallocate (T *ptr, size_t size = 0 ) checkCudaErrors (cudaFree (ptr)); } template <class ... Args> void construct (T *p, Args &&...args) if constexpr (!(sizeof ...(Args) == 0 && std::is_pod_v<T>)) ::new ((void *)p) T (std::forward<Args>(args)...) ; } }; template <int N, class T > __global__ void kernel (T *arr) { for (int i = blockDim.x * blockIdx.x + threadIdx.x; i < N; i += blockDim.x * gridDim.x) { arr[i] = i; } } int main () constexpr int n = 65536 ; std::vector<int , CudaAllocator<int >> arr (n); kernel<n><<<32 , 128 >>>(arr.data ()); checkCudaErrors (cudaDeviceSynchronize ()); for (int i = 0 ; i < n; i++) { printf ("arr[%d]: %d\n" , i, arr[i]); } return 0 ; }
进一步:核函数可以接受函子(functor),实现函数式编程
在 C++ 中,函子 (Functor)是一个可以像函数一样被调用的对象 。也就是说,函子是一个重载了 operator() 的类或结构体的实例
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 #include <cuda_runtime.h> #include <cstdio> #include <vector> #include "helper_cuda.h" template <class Func >__global__ void parallel_for (int n, Func func) { for (int i = blockDim.x * blockIdx.x + threadIdx.x; i < n; i += blockDim.x * gridDim.x) { func (i); } } struct MyFunctor { __device__ void operator () (int i) const { printf ("number %d\n" , i); } }; int main () int n = 65536 ; parallel_for<<<32 , 128 >>>(n, MyFunctor{}); checkCudaErrors (cudaDeviceSynchronize ()); return 0 ; }
不过要注意三点:
这里的 Func 不可以是 Func const &,那样会变成一个指向 CPU 内存地址的指针,从而出错。所以 CPU 向 GPU 的传参必须按值传。
做参数的这个函数必须是一个有着成员函数 operator() 的类型,即 functor 类。而不能是独立的函数,否则报错。
这个函数必须标记为 __device__,即 GPU 上的函数,否则会变成 CPU 上的函数。
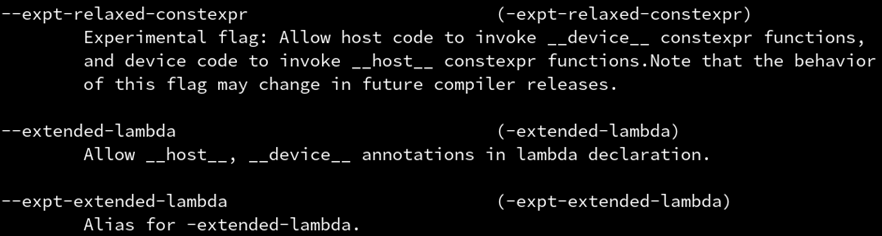
进一步:函子可以是 lambda 表达式 lambda这么方便,CUDA当然也要支持,只需要开启 --extended-lambda选项
接下来就可以直接写 lambda 表达式,不过必须在 [] 后,() 前,插入 __device__ 修饰符。
为了只对 .cu 文件开启这个开关,可以用 CMake 的生成器表达式,限制 flag 只对 CUDA 源码生效,这样可以混合其他 .cpp 文件也不会发生 gcc 报错的情况了。。
1 2 3 add_executable (main main.cu)target_include_directories (main PUBLIC ../../include )target_compile_options (main PUBLIC $<$<COMPILE_LANGUAGE:CUDA>:--extended-lambda>)
怎样捕获外部变量? lambda表达式在CUDA上要怎样捕获变量呢?
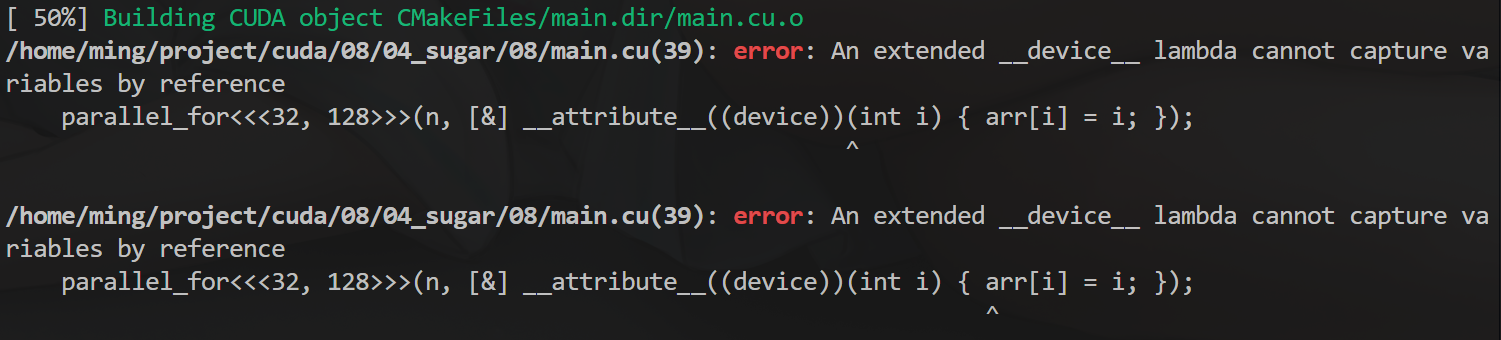
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 #include <cuda_runtime.h> #include <cstdio> #include <vector> #include "helper_cuda.h" template <class T >struct CudaAllocator { using value_type = T; T *allocate (size_t size) { T *ptr = nullptr ; checkCudaErrors (cudaMallocManaged (&ptr, size * sizeof (T))); return ptr; } void deallocate (T *ptr, size_t size = 0 ) checkCudaErrors (cudaFree (ptr)); } template <class ... Args> void construct (T *p, Args &&...args) if constexpr (!(sizeof ...(Args) == 0 && std::is_pod_v<T>)) ::new ((void *)p) T (std::forward<Args>(args)...) ; } }; template <class Func >__global__ void parallel_for (int n, Func func) { for (int i = blockDim.x * blockIdx.x + threadIdx.x; i < n; i += blockDim.x * gridDim.x) { func (i); } } int main () int n = 65536 ; std::vector<int , CudaAllocator<int >> arr (n); parallel_for<<<32 , 128 >>>(n, [&] __device__(int i) { arr[i] = i; }); checkCudaErrors (cudaDeviceSynchronize ()); return 0 ; }
如果试图用 [&] 捕获变量是会出错的,毕竟这时候捕获到的是堆栈(CPU 内存)上的变量 arr 本身,而不是 arr 所指向的内存地址(GPU 内存)。
你可能会想,是不是可以用 [=] 按值捕获,这样捕获到的就是指针了吧?
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 #include <cuda_runtime.h> #include <cstdio> #include <vector> #include "helper_cuda.h" template <class T >struct CudaAllocator { using value_type = T; T *allocate (size_t size) { T *ptr = nullptr ; checkCudaErrors (cudaMallocManaged (&ptr, size * sizeof (T))); return ptr; } void deallocate (T *ptr, size_t size = 0 ) checkCudaErrors (cudaFree (ptr)); } template <class ... Args> void construct (T *p, Args &&...args) if constexpr (!(sizeof ...(Args) == 0 && std::is_pod_v<T>)) ::new ((void *)p) T (std::forward<Args>(args)...) ; } }; template <class Func >__global__ void parallel_for (int n, Func func) { for (int i = blockDim.x * blockIdx.x + threadIdx.x; i < n; i += blockDim.x * gridDim.x) { func (i); } } int main () int n = 65536 ; std::vector<int , CudaAllocator<int >> arr (n); parallel_for<<<32 , 128 >>>(n, [=] __device__(int i) { arr[i] = i; }); checkCudaErrors (cudaDeviceSynchronize ()); return 0 ; }
错了,不要忘了我们在STL中说过,vector 的拷贝是深拷贝(绝大多数C++类都是深拷贝,除了智能指针和原始指针)。这样只会把 vector 整个地拷贝到 GPU 上!而不是浅拷贝其起始地址指针。
正确的做法 是,首先获取arr.data() 的值到 arr_data 变量,然后用 [=] 按值捕获 arr_data,函数体里面也通过 arr_data 来访问 arr。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 #include <cuda_runtime.h> #include <cstdio> #include <vector> #include "helper_cuda.h" template <class T >struct CudaAllocator { using value_type = T; T *allocate (size_t size) { T *ptr = nullptr ; checkCudaErrors (cudaMallocManaged (&ptr, size * sizeof (T))); return ptr; } void deallocate (T *ptr, size_t size = 0 ) checkCudaErrors (cudaFree (ptr)); } template <class ... Args> void construct (T *p, Args &&...args) if constexpr (!(sizeof ...(Args) == 0 && std::is_pod_v<T>)) ::new ((void *)p) T (std::forward<Args>(args)...) ; } }; template <class Func >__global__ void parallel_for (int n, Func func) { for (int i = blockDim.x * blockIdx.x + threadIdx.x; i < n; i += blockDim.x * gridDim.x) { func (i); } } int main () int n = 65536 ; std::vector<int , CudaAllocator<int >> arr (n); int *arr_data = arr.data (); parallel_for<<<32 , 128 >>>(n, [=] __device__(int i) { arr_data[i] = i; }); checkCudaErrors (cudaDeviceSynchronize ()); for (int i = 0 ; i < n; i++) { printf ("arr[%d] = %d\n" , i, arr[i]); } return 0 ; }
为什么这样?因为 data() 返回一个起始地址的原始指针,而原始指针是浅拷贝的,所以可以拷贝到 GPU 上,让他访问。这样和之前作为核函数参数是一样的,不过是作为 Func 结构体统一传入了。
或者在 [] 里这样直接写自定义捕获的表达式也是可以的,这样就可以用同一变量名。
1 2 3 4 std::vector<int , CudaAllocator<int >> arr (n); parallel_for<<<32 , 128 >>>( n, [arr = arr.data ()] __device__(int i) { arr[i] = i; });